
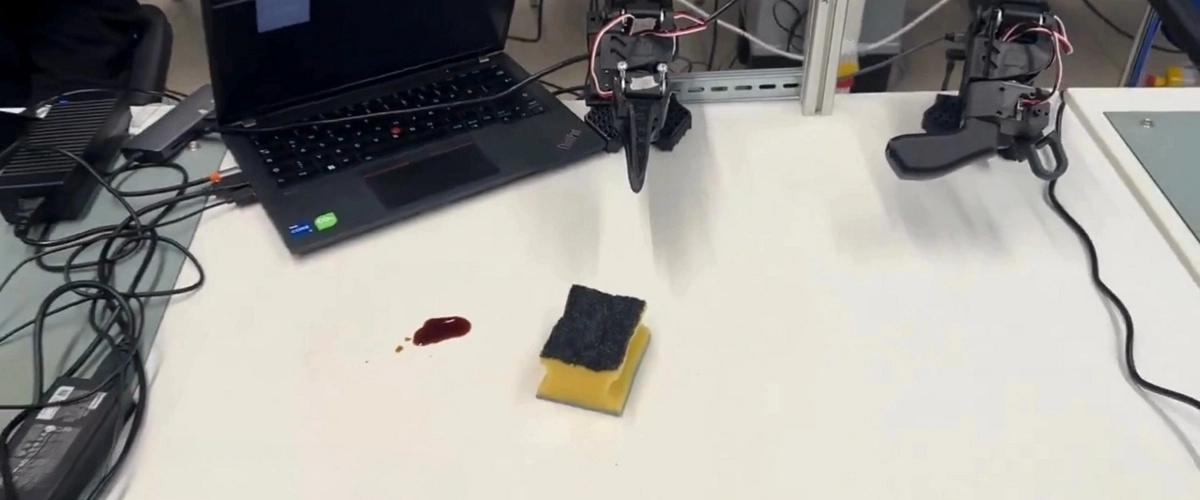
Проект использует роботы-манипуляторы SO-100 от The Robot Studio для уборки пролитых жидкостей. Управление роботами осуществляется с помощью мультимодального агента LangChain AI, обеспечивающего постоянное взаимодействие с окружающей средой.
Чтобы улучшить точность движений манипуляторов, команда использовала алгоритмы обучения с подкреплением Actor-Critic от LeRobot. Это позволило роботам самостоятельно освоить оптимальные движения и адаптироваться к меняющимся условиям работы. Для каждой стратегии движения использовалось около 100 демонстраций, что позволило создать обширную обучающую выборку. Благодаря этому роборуки выработали эффективные способы выполнения задач и научились имитировать человеческие действия.
SO-100 представляет собой роботизированную руку с открытым исходным кодом, напечатанную на 3D-принтере. Она спроектирована с акцентом на доступность и простоту сборки: для ее работы требуется всего шесть сервоприводов, одна адаптерная плата и напечатанные на 3D-принтере детали. Все необходимые файлы доступны на GitHub Robot Studio, а при оптовой закупке стоимость одной единицы составляет менее $100.
Детали манипулятора из углеродного волокна, напечатанные на 3D-принтере, прочные и легко заменяются. Регулируемые параметры и улучшенный захват позволяют легко модифицировать робота под конкретные задачи. Для оптимальной работы требуется установить опору сервопривода под углом 45 градусов. Каждый сервопривод получает уникальный идентификатор, который программируется через адаптерную плату, подключенную к источнику питания. Сервоприводы соединяются последовательно, образуя цепочку, и идентифицируются в соответствии с их порядком в цепи.
Сборка роботизированной руки с сервоприводами проста, но требует аккуратности. Перед установкой компонентов необходимо аккуратно размотать провода и убедиться, что они не пережаты. Каждый сервопривод крепится с помощью винтов, которые затягиваются вручную, обеспечивая надежное соединение без чрезмерного усилия. Всего за 30 минут можно собрать мощную и быструю роборуку.
Проект демонстрирует, как робототехника становится все доступнее: открытые ресурсы и совместные платформы дают разработчикам возможность создавать передовые решения для автоматизации.



