

БПЛА, разработанный в лаборатории MIT Spark Lab, продемонстрировал свои возможности в тестах, где его когти захватывали бутылку на лету. Это первая в своем роде воздушная платформа с полностью автономной системой восприятия, которая позволяет дрону надежно определять местоположение и форму объектов и эффективно их захватывать, как отмечают авторы разработки.
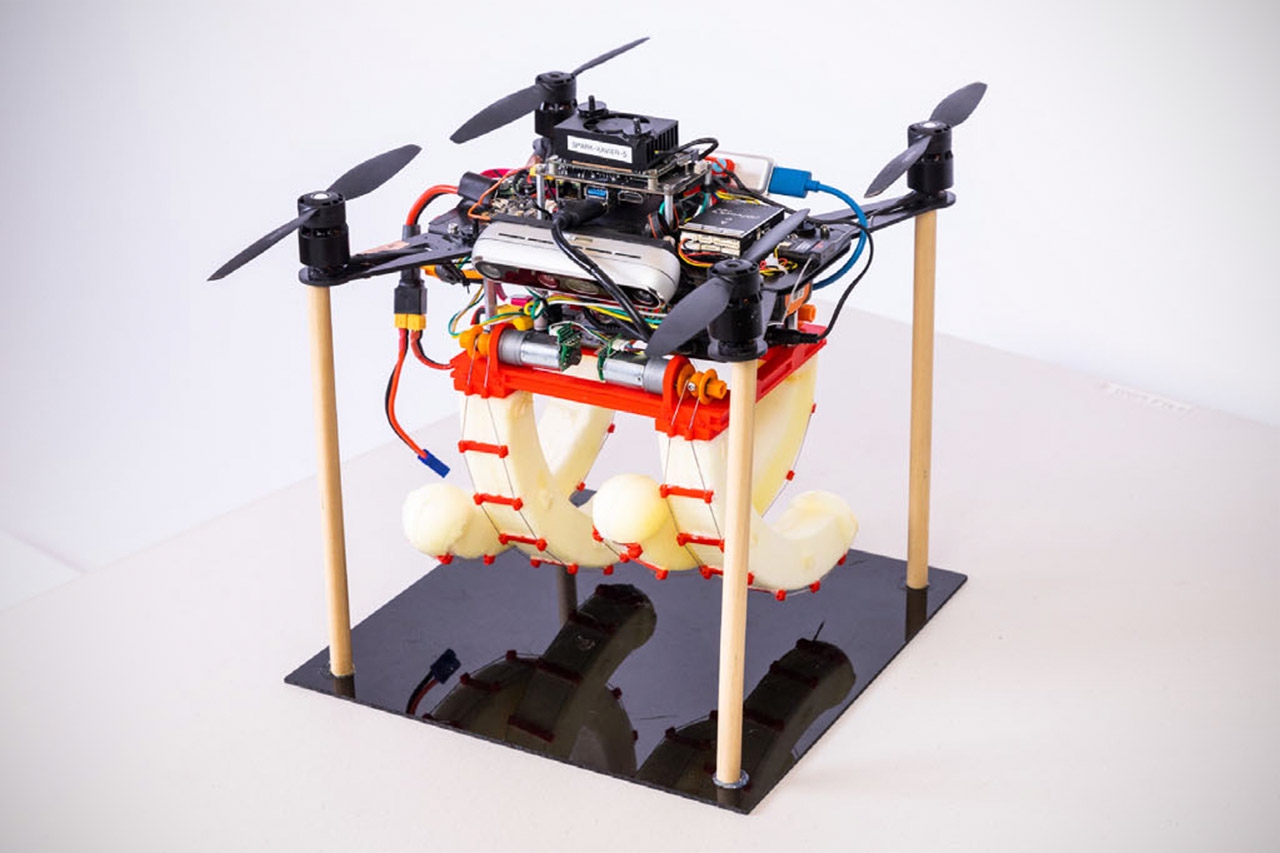
Мягкие и быстрые когти дрона создали по образу птичьих лап. Однако, в отличие от животных, дрону требуется высокая точность управления и способность выполнять сложные маневры во время захвата объектов. Традиционные жесткие манипуляторы требуют точного позиционирования и прикладывают механическое усилие при захвате. Новый дрон использует мягкие манипуляторы, которые быстро адаптируются к форме объекта и снижают риск его повреждения.
Система захвата оснащена гибкими сухожилиями, что позволяет ей мягко и быстро сжиматься вокруг предметов. Это не только минимизирует риск повреждения захватываемого объекта, но и помогает стабилизировать хват за счет поглощения непредвиденных сил. Встроенная система восприятия дрона включает семантический детектор ключевых точек на основе нейронных сетей, 3D-оценщик положения объекта и систему сглаживания, что позволяет дрону точно определять положение и ориентацию предметов в пространстве.
Эксперименты показали, что дрон может захватывать предметы в различных условиях, как в помещении, так и на открытом воздухе, развивая скорость до 2 метров в секунду, что является рекордным показателем для захватов на основе визуального восприятия. Кроме того, дрон способен ловить движущиеся объекты на скорости до 0,3 м/с, что делает его пригодным для таких задач, как доставка посылок и поисково-спасательные операции.
Новая технология имеет широкие перспективы применения, от простых задач вроде доставки пакетов до более сложных миссий в опасных условиях. На видео, представленном MIT, дрон успешно захватывает бутылку с поверхности стола. Ранее подобные действия считались недоступными для беспилотников.



