
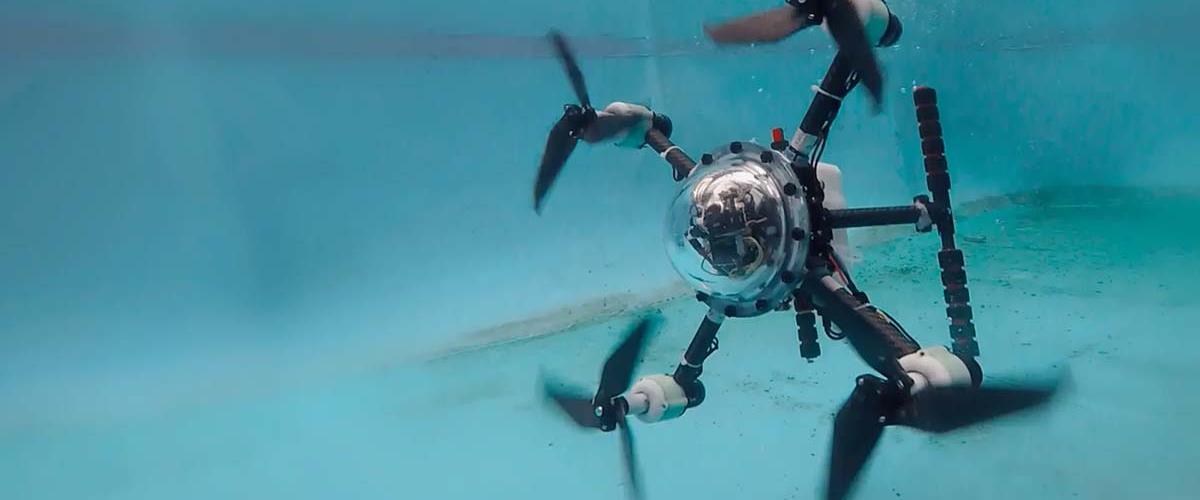
На первый взгляд дрон похож на любой другой квадрокоптер. Он состоит из центрального куполообразного корпуса и четырех «плеч», каждое из которых имеет на конце двигательную установку — моторно-пропеллерный модуль. Каждый силовой агрегат включает в себя специальную двухскоростную коробку передач. Рычаг, на котором она установлена, может независимо вращаться относительно остальной части дрона.
Когда беспилотник находится в полете, все четыре блока смотрят вверх и вращают винты с большей из двух скоростей. Как только он приземляется на воду, пропеллеры опускаются вниз, а затем вращаются с меньшей скоростью, утягивая дрон под воду. Чтобы двигаться как по вертикали, так и по горизонтали после полного погружения, дрон регулирует угол и тягу каждой двигательной установки по мере необходимости.
В текущей комплектации TJ-FlyingFish весом 1,63 кг может парить шесть минут на одном заряде или перемещаться под водой в течение 40 минут. Дрон способен погружаться на максимальную глубину 3 м, а его наибольшая скорость под водой достигает 2 м/с.
Функциональный прототип TJ-FlyingFish разработали ученые из Шанхайского научно-исследовательского института интеллектуальных автономных систем Китая, Университета Тунцзи и Исследовательской группы беспилотных систем Китайского университета Гонконга.
Беспилотник полностью автономен, говорят разработчики. Технологию потенциально можно применять при аэрофотосъемке, дистанционном зондировании и поисково-спасательных операциях. Ученые представят доклад о своем исследовании в мае на Международной конференции IEEE по робототехнике и автоматизации в Лондоне.



