
Многие роботизированные системы уже способны выполнять «крупные» действия — складывать одежду или переносить предметы. Но как только дело доходит до взаимодействия с мелкими и хрупкими объектами, начинаются сложности. Новая разработка под названием FORTE (Fragile Object grasping with Tactile sensing) призвана решить эту проблему, сочетая мягкую робототехнику с системой тактильных датчиков.
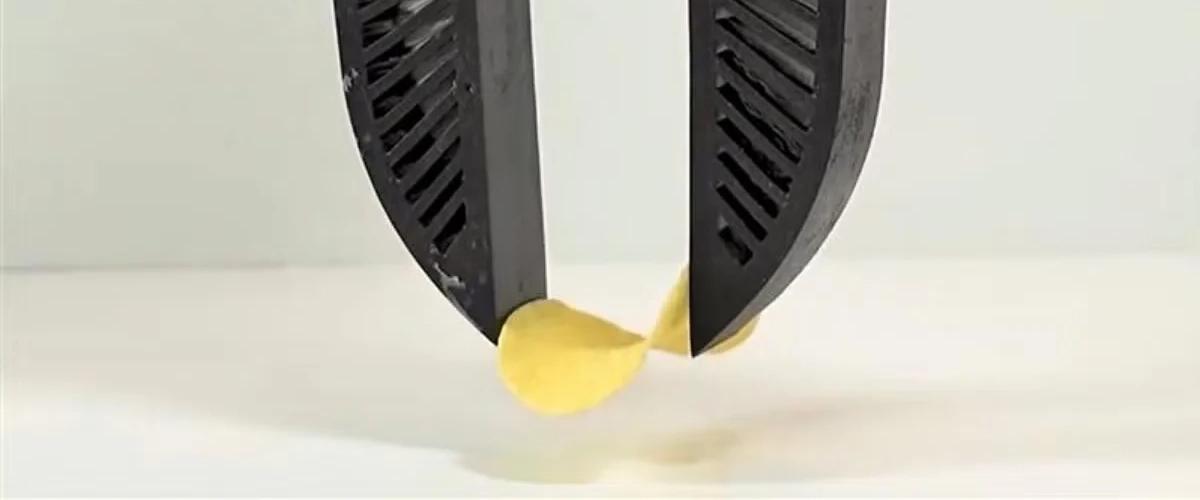
Конструкция робота вдохновлена рыбьими плавниками. Манипуляторы изготовлены с помощью 3D-печати и имеют внутренние воздушные каналы. Когда робот пытается взять предмет, каналы слегка деформируются, что вызывает изменение давления воздуха внутри конструкции.
Эти изменения фиксируются небольшими датчиками, которые передают системе обратную связь о силе захвата в режиме реального времени. Благодаря этому робот может определить, начинает ли предмет выскальзывать из «пальцев», и автоматически скорректировать силу захвата, избегая чрезмерного давления.
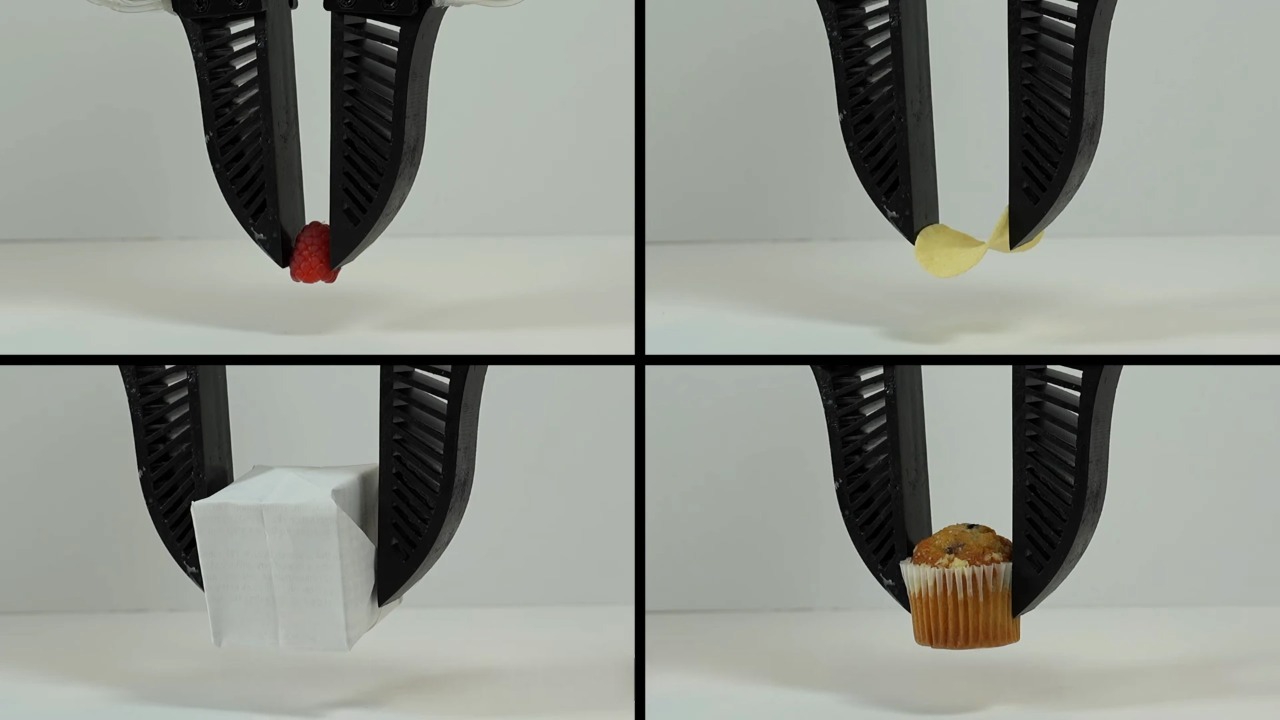
В ходе экспериментов команда протестировала систему на 31 объекте. Среди них были хрупкие предметы, такие как малина и чипсы; скользкие поверхности, например, банки с вареньем и бильярдные шары; а также обычные бытовые предметы — яблоки и консервные банки.
Система показала 91,9% успешных захватов с первой попытки и смогла обнаружить 93% случаев выскальзывания со 100% точностью. В результате робот применял дополнительную силу только тогда, когда это было действительно необходимо.
Исследователи считают, что технология пригодится в разных отраслях — от пищевой промышленности до медицины и высокоточного производства. По словам доцента университета Лилиан Чин, новые датчики работают со скоростью, близкой к чувствительности человеческой руки, что делает роботов более аккуратными при взаимодействии с окружающими предметами.



