В отличие от традиционных методов манипуляции на микроскопическом уровне, требующих прямого контакта или внешних механических инструментов, гидродинамический крутящий момент предлагает масштабируемый, программируемый и бесконтактный подход. Он позволяет одновременно управлять множеством объектов и открывает перспективы для микропроизводства и биомедицинской инженерии — от сборки миниатюрных устройств до транспортировки биологических образцов внутри организма человека.
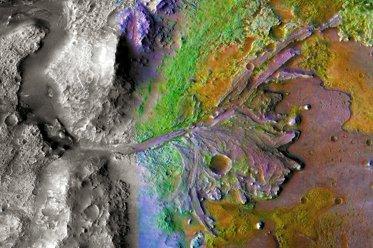
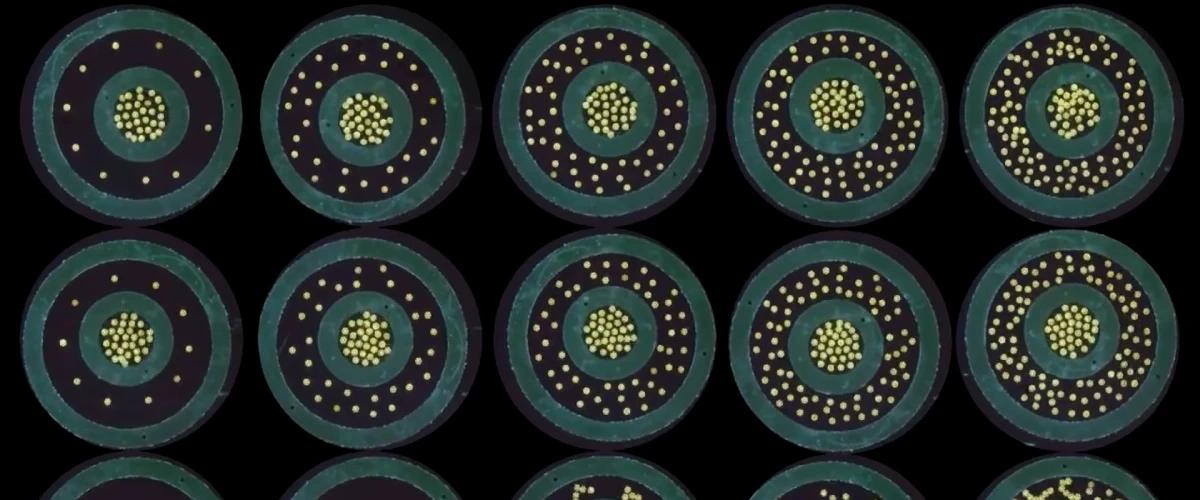
Микроботы, разработанные учеными из Германии и США, диаметром около 300 мкм и вращаются под действием внешнего магнитного поля, создавая в окружающей жидкости круговые потоки. Эти потоки генерируют гидродинамический крутящий момент, которым можно точно управлять, меняя скорость вращения, количество роботов и их расположение в пространстве.
Ключевое преимущество подхода — бесконтактность. Использование движения жидкости для передачи усилий снижает риск повреждения при работе с хрупкими структурами. Исследователи продемонстрировали вращение зубчатых колес в разных направлениях в зависимости от позиционирования роботов, а также сборку трехмерных объектов, масса которых в 45 000 раз превышает массу одного микроробота.
Экспериментально достигнутый момент силы составил до 3,6 × 10⁻⁹ ньютон-метров, говорится в пресс-релизе Института Макса Планка. Наблюдались и адаптивные коллективные поведения: при определенных условиях рой переходил от вращательного движения к «ползанию» по поверхностям объектов, перестраиваясь в зависимости от условий среды и требований задачи.
«Гидродинамическое сопротивление долгое время было важным механизмом для разнообразного поведения коллективов микророботов, но здесь мы используем те же жидкостные взаимодействия для дистанционного контроля объектов, — пояснил Стивен Серон из Мичиганского университета, один из исследователей. — Это невероятно захватывающе, поскольку открывает путь к дистанционному управлению на малых масштабах, где окружающая среда работает на нас».
В Германии создано новое поколение микророботов, способных объединяться в автономные коллективы под водой. Устройства размером всего около миллиметра умеют перемещаться с помощью миниатюрных пузырьковых двигателей, обмениваться световыми сигналами и координировать действия.