До сих пор микророботы могли летать только медленно и по плавным траекториям. Это делало их непрактичными для задач, требующих быстрой реакции и высокой маневренности.
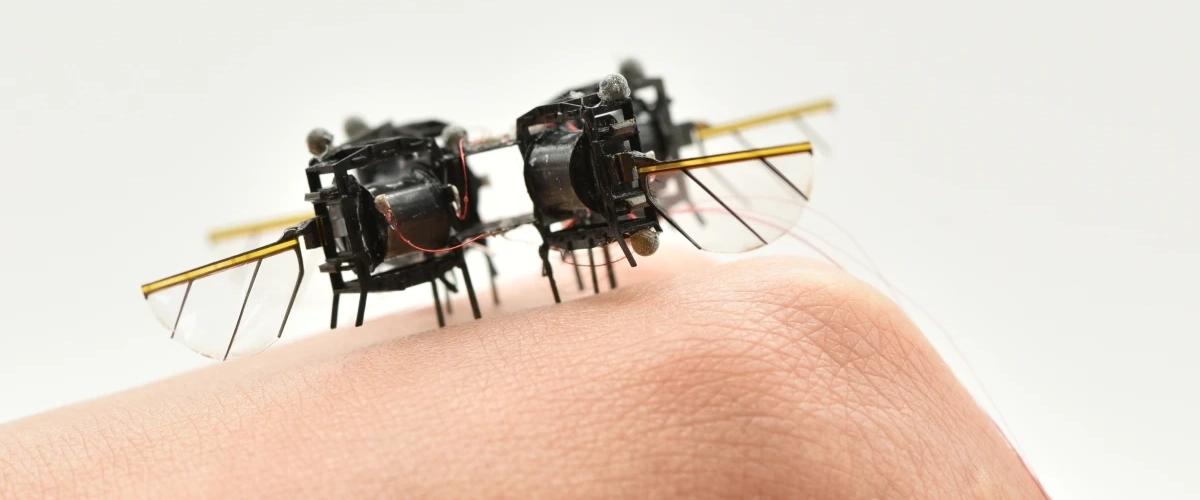
Ученые разработали нового миниатюрного робота размером с насекомое, оснащенного машущими крыльями и мягкими искусственными мышцами. Робот весит меньше канцелярской скрепки и способен совершать быстрые и точные движения благодаря улучшенной конструкции крыльев и легкой аэродинамике.
Главным нововведением стала двухэтапная схема управления на базе искусственного интеллекта. На первом этапе мощный контроллер прогнозирует поведение робота и рассчитывает оптимальные действия для безопасного следования по траектории. На втором этапе эти данные используются для обучения «политики» управления через имитационное обучение. По сути, сложный планировщик превращается в эффективную ИИ-модель принятия решений в реальном времени. Политика на основе ИИ использует позиции робота в качестве входных данных и выдает команды управления, включая силу тяги и крутящий момент. Такая система позволяет учитывать неопределенность и быстро выполнять сложные маневры.
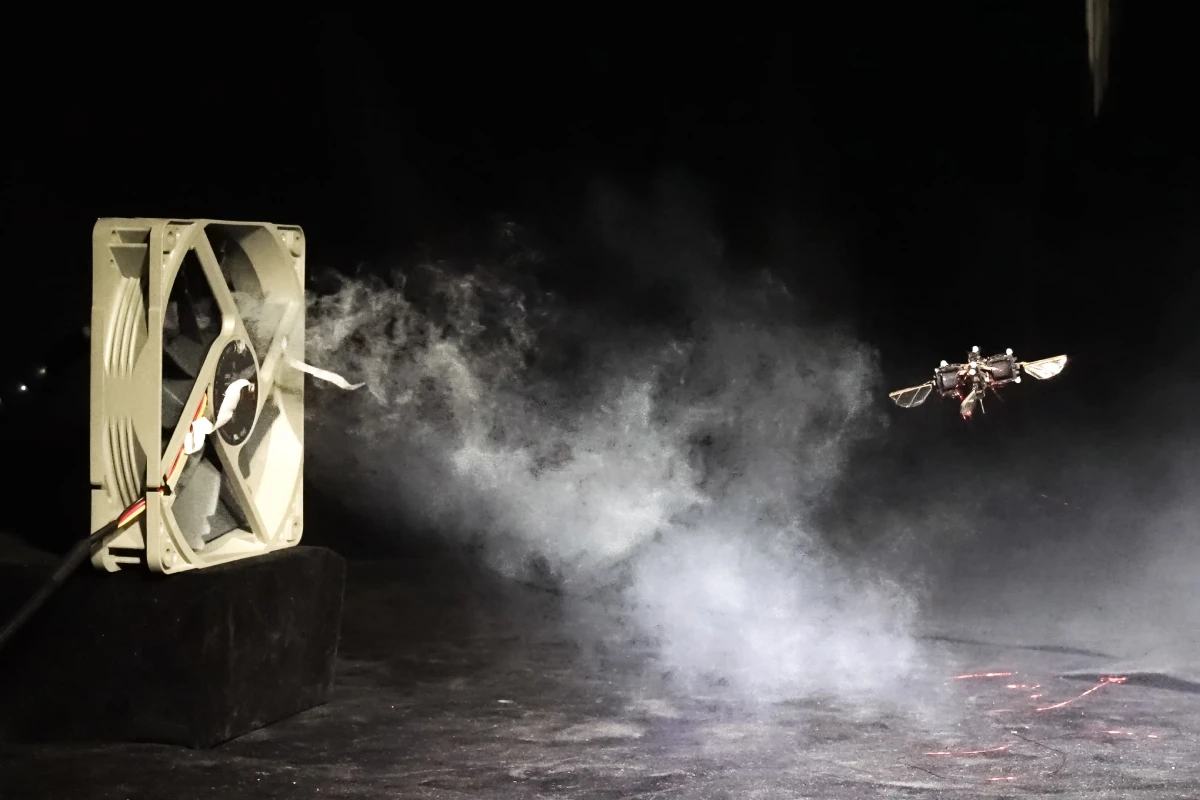

В ходе экспериментов робот смог увеличивать скорость полёта на 447%, ускорение на 255% и выполнить 10 сальто за 11 секунд, оставаясь на траектории с отклонением всего 4-5 см. Эти результаты демонстрируют высокую точность и стабильность даже при сложных маневрах и внешних помехах.
Исследователи также продемонстрировали саккадические движения — быстрые серии наклонов, которые насекомые совершают для агрессивного маневра. Они резко ускоряются, занимают нужную позицию и тормозят противоположным наклоном. Эти рывки позволяют им ориентироваться.
Разработка открывает новые возможности для микроробототехники. В будущем такие роботы смогут использовать встроенные камеры и сенсоры для автономной навигации, избегать столкновений и координироваться друг с другом. Сейчас контроллер работает на внешнем компьютере, а не на самом роботе, но исследователи планируют улучшить алгоритмы управления и создать полностью автономные версии для работы в реальных условиях.