
В последние годы инженеры учатся использовать настоящую мышечную ткань для приведения в действие «биогибридных роботов», созданных как из живой ткани, так и из искусственных компонентов. Но по большей части эти конструкции ограничены в объеме движений и мощности, которые они могут производить.
Новый мышечно-сухожильный блок, разработанный специалистами Массачусетского технологического института, может стать универсальным узлом для широкого спектра биогибридных роботов. Присущая ему модульность позволит упростить разработку широкого спектра робототехнических приложений — от микрохирургических инструментов до адаптивных автономных исследовательских машин, пишет MIT News.
Исследователи взяли в качестве материала для искусственных сухожилий полимерный гидрогель. После экспериментов с эластичностью и прочностью они разработали три типа приводов, представляющих центральную мышцу, два соединительных сухожилия и захватывающее устройство в качестве скелета. Зная жесткость мышц и скелета, они рассчитали желаемую жесткость сухожилий.
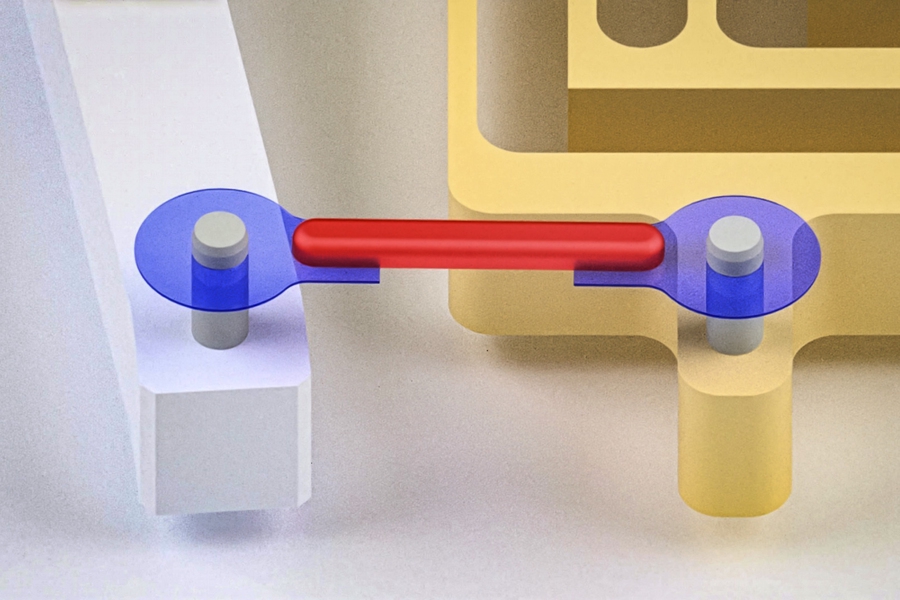
Как только гель был готов, им заполнили кабели и соединили сухожилия с выращенными в лаборатории мышечными тканями. Конец каждого сухожилия крепился к пальцу роботизированной кисти.
Когда мышцы сокращались, сухожилия сводили пальцы гриппера вместе. В ходе многочисленных экспериментов исследователи обнаружили, что мышечно-сухожильный захват работал в три раза быстрее и создавал в 30 раз больше силы по сравнению с захватом, приводимым в действие только полосой мышечной ткани. Кроме того, новая конструкция поддерживала эту производительность на протяжении 7000 мышечных сокращений.
В целом, инженеры обнаружили, что добавление искусственных сухожилий увеличило соотношение мощности к массе робота в 11 раз. Другими словами, системе требуется гораздо меньше мышц для выполнения того же объема работы.
«Большинство приводов, с которыми обычно работают инженеры, очень сложно сделать маленькими, — пояснила Риту Раман, руководитель исследовательского проекта. — После определенного размера базовые физические законы перестают работать. Преимущество мышц в том, что каждая клетка — это независимый привод, генерирующий силу и создающий движение. Таким образом, в принципе, можно создавать роботов действительно маленького размера».
Мышечные приводы обладают и другими преимуществами, которые команда Рамана уже продемонстрировала: ткань может становиться сильнее по мере тренировки и естественным образом восстанавливаться при травмах. Это значит, что мускульных роботов можно будет отправлять исследовать места, слишком удаленные или опасные для человека. А биороботы могли бы выполнять операции внутри человеческого тела.
Скандал вокруг слишком сильных роботов разразился недавно в США: бывший инженер Figure AI обвинил компанию в незаконном увольнении. Роберт Грюндель, возглавлявший отдел безопасности продукции, утверждал, что его сократили вскоре после того, как он сообщил топ-менеджерам, что роботы компании достаточно сильны, чтобы «ударом проломить человеческий череп».



