
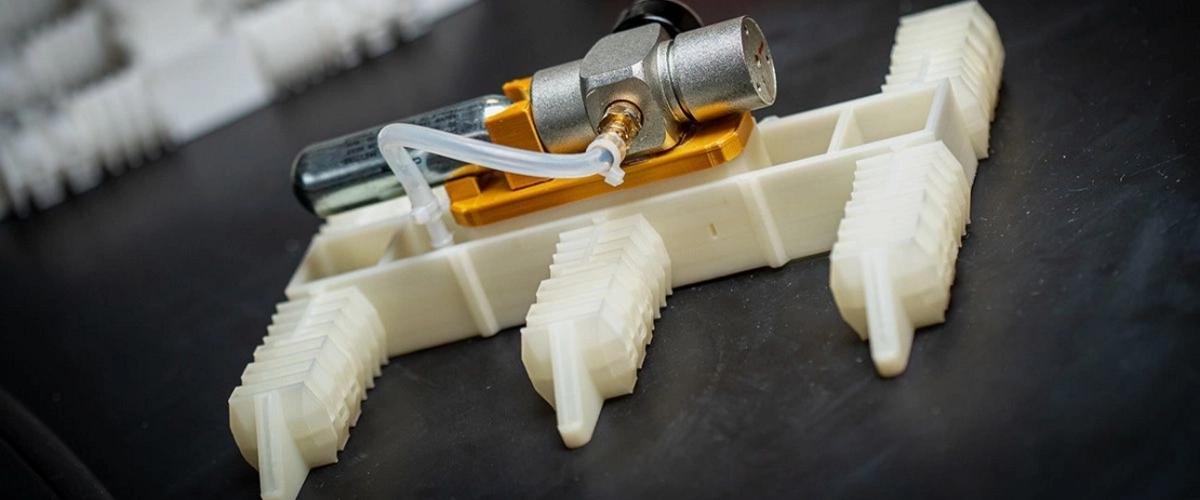
Разработка принадлежит команде лаборатории биоинспирированной робототехники, которой руководит профессор Майкл Толли. Её ведущий исследователь — аспирант Ичэнь Чжай. Учёные хотели создать максимально простое и доступное устройство, не использующее традиционные жёсткие элементы. Главной задачей команды стало найти оптимальную форму и структуру робота, чтобы его можно было напечатать целиком за один раз. Вся конструкция состоит из мягкого гибкого материала, выполняющего одновременно функции искусственных мышц и системы управления.
Для движения используется пневматическая система, которая подаёт воздух поочерёдно к 2 группам ног робота. По принципу работы механизм похож на паровой двигатель локомотива. Всего у устройства 6 ног, каждая из которых движется вверх-вниз и вперёд-назад. Благодаря этому робот уверенно передвигается: он может ходить по песку, траве и даже под водой. Во время испытаний в лаборатории роботы могли непрерывно двигаться до 3 суток при постоянной подаче газа, а при подключении автономного картриджа успешно работали на улице.
Подобных роботов удобно применять там, где обычная электроника не выдерживает экстремальных условий: при высоком радиационном фоне, во время стихийных бедствий или при исследовании космоса. Сейчас команда Толли работает над тем, чтобы хранить запас газа непосредственно внутри робота, а также планирует использовать биоразлагаемые материалы и оснастить устройство дополнительными манипуляторами, например, захватами.
Разработка велась совместно с корпорацией BASF в рамках Калифорнийского исследовательского альянса (CARA), который занимается испытанием различных мягких материалов для печати. Хотя некоторые протестированные материалы пока недоступны в широкой продаже, роботов удалось успешно напечатать из обычных недорогих полимеров. Исследование поддержал Национальный научный фонд США. Впервые похожих роботов показали публике ещё в 2022 году на Конференции по робототехнике имени Гордона.



