
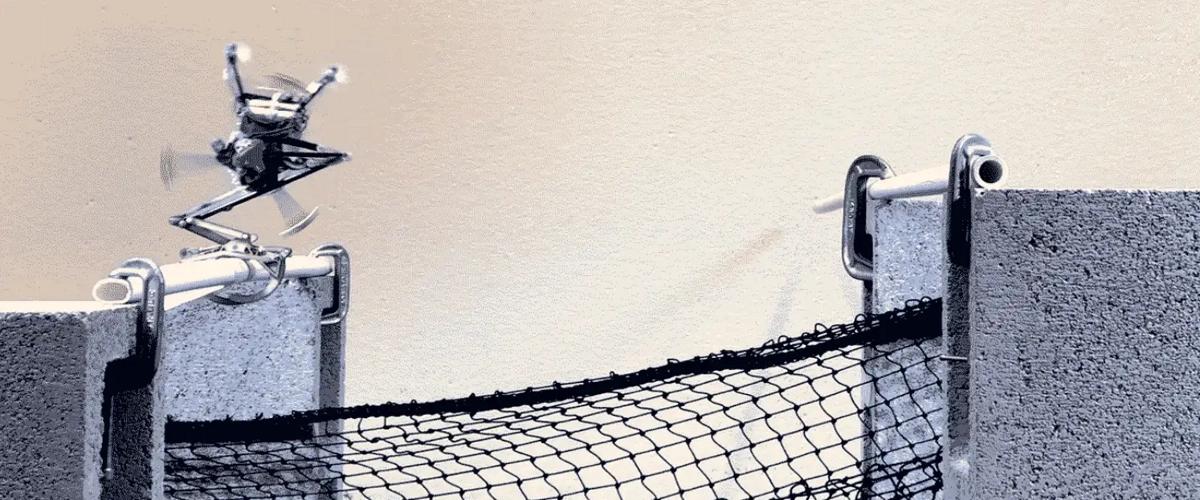
Одноногий робот Salto, разработанный в Калифорнийском университете в Беркли в 2016 году, уже умел прыгать, заниматься паркуром и приземляться на ровную поверхность. Однако новая задача — приземляться на узкий стержень — потребовала применения принципов, подсмотренных у белок, настоящих мастеров ловкости.
За пять лет исследований ученые изучили, как эти животные маневрируют и стабилизируются при прыжках. Задача заключалась в том, чтобы научить робота приземляться на узкие объекты, например, ветки. Робот уже был оснащен маховиком для балансировки, но этого оказалось недостаточно для точного приземления на неустойчивые поверхности. Тогда исследователи изменили работу моторов, используя их для торможения при посадке.
Человек крутит руками или меняет позу для удержания равновесия. Ученые предположили, что белка тоже стабилизируется с помощью лап. Чтобы проверить это, они установили на ветку датчики, которые измеряли силу приземления и крутящий момент, создаваемый лапами белки. Эти данные помогли улучшить алгоритмы робота. Высокоскоростная съемка показала, что белки при приземлении делают что-то вроде стойки на передних лапах. Они направляют силу через плечевой сустав, минимизируя нагрузку, а затем хватаются за ветку подушечками лап. Это позволяет компенсировать избыточный крутящий момент и избежать падения. Почти вся кинетическая энергия (86%) поглощается передними лапами: при недолете лапы создают тяговый момент, при перелете — тормозящий.
Для балансировки белки регулируют тормозное усилие. Если прыжок короткий, они уменьшают усилие, позволяя лапам слегка согнуться, что снижает инерцию. Если же животное перелетает цель, увеличение тормозного усилия помогает быстрее погасить излишнюю скорость и стабилизировать приземление, чтобы не упасть.
Робот был модернизирован: в него добавили функцию регулировки силы ног, что усилило крутящий момент маховика. Благодаря этому он смог несколько раз прыгнуть на ветку и удержать равновесие, несмотря на отсутствие активного захвата. В будущем планируется изучить более совершенные механизмы, которые позволят лучше контролировать приземление не только на ветки, но и на сложные неровные поверхности.
Одноногие роботы могут показаться непрактичными из-за риска падения, но для прыжков на большую высоту одна нога — оптимальное решение. Вся мощность сосредоточена в одной конечности, что повышает эффективность. Проект по созданию робота финансируется NASA. Устройство могло бы исследовать Энцелад, спутник Сатурна, где гравитация в 80 раз слабее земной, и один прыжок может перенести робота на расстояние футбольного поля.



