
Команда исследователей из Университета Джонса Хопкинса и Стэнфордского университета обучила хирургическую систему da Vinci выполнять базовые хирургические операции с помощью имитационного обучения. Модель основана на той же архитектуре машинного обучения, что и ChatGPT. Вместо работы с текстом, она оперирует кинематическими данными, представляя движения робота в виде математических уравнений.
Исследователи обучили свою модель на сотнях видеозаписей с камер, установленных на руках хирургов, управляющих роботами da Vinci во время операций. Эти видео используются для послеоперационного анализа и затем архивируются. По всему миру используется почти 7000 роботов da Vinci, и более 50 000 хирургов обучены работе с этой системой.
Система da Vinci, несмотря на свою популярность, может быть неточной. Команде удалось найти способ компенсировать эти погрешности. Ключевым моментом стало обучение модели выполнению относительных, а не абсолютных движений, что позволило значительно повысить точность. Достаточно предоставить системе изображение, и она определит необходимое действие. Даже на основе нескольких сотен примеров модель научилась выполнять задачу и адаптироваться к новым условиям. Если система, например, уронит иглу, то автоматически поднимет ее и продолжит.
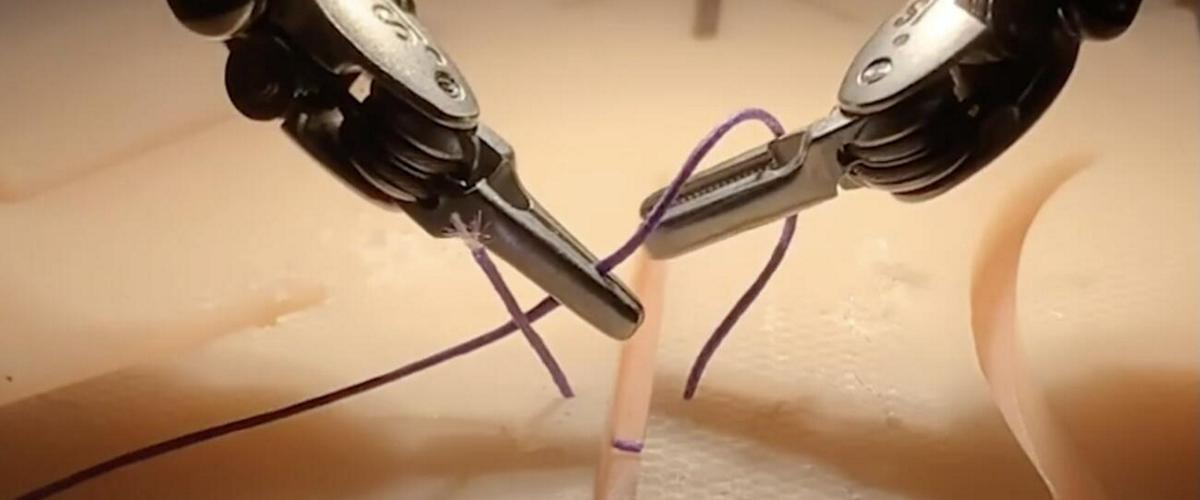
Робота обучили выполнять три основные хирургические операции: манипулирование иглой, перемещение тканей и наложение швов. Благодаря разработанной модели робот освоил эти навыки на уровне, сопоставимом с уровнем опытного хирурга.
Разработанная модель открывает новые возможности для быстрого обучения роботов хирургическим манипуляциям. Команда планирует использовать ее для подготовки робота к выполнению комплексных хирургических операций, а не только небольших задач.
До недавнего времени программирование хирургических роботов было крайне трудоемким процессом, требующим ручного кодирования каждого действия. Теперь, благодаря методу имитационного обучения, можно обучить систему выполнять сложные хирургические манипуляции за несколько дней. Это открывает новые перспективы для развития автономной хирургии и повышения качества медицинской помощи.



