
Традиционные человекоподобные роботы конструируются на основе двигателей и жестких металлических суставов, аналогичных тем, что используются в промышленной робототехнике. Такие громоздкие устройства не только очень дороги, но и потенциально небезопасны при использовании в домашних условиях. «Если кто-то из них упадет на вас, будет очень больно», — сказал профессор робототехники ETH Zurich Роберт Кацшманн. Ученый добавил, что будущий робот-помощник должен уметь не только переносить тяжелые предметы, но и «обнимать людей или пожимать им руки».
Вдохновленные 600 мышцами человеческого тела, швейцарские исследователи разработали технологию, позволяющую роботам двигаться более плавно и гибко, подобно людям. Для этого они использовали «искусственные мышцы» — электрогидравлические приводы. Эти мягкие актуаторы напоминают пакеты для заморозки: они заполнены маслом и оснащены электродами. Обычные роботизированные ноги приводятся в движение электромагнитным роторным двигателем.
За счет способности жидкости сжиматься и расширяться, технология позволяет точнее воспроизводить работу мышц животных. Электростатическая система потребляет меньше энергии, чем традиционные двигатели, когда сустав робота согнут, например, при приседаниях.
Традиционные электродвигатели в роботизированных ногах сильно нагреваются при длительной статической нагрузке из-за протекания через них постоянного тока. Искусственные мышцы, основанные на электростатике, лишены этого недостатка: они остаются холодными, так как для удержания положения не требуют постоянного тока.
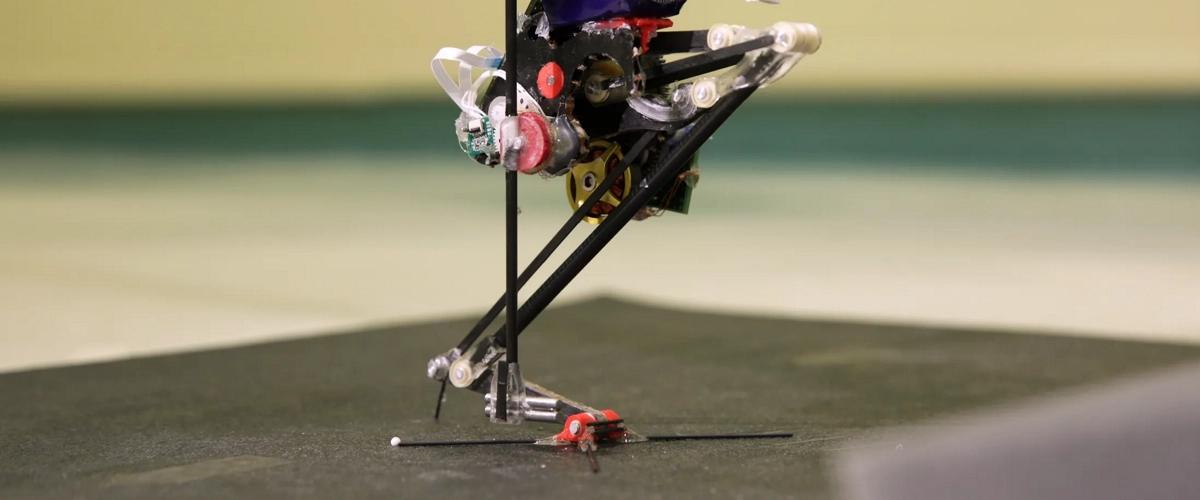
Согласно исследованию, нога демонстрирует более высокую маневренность при движении по неровной местности в сравнении со своими жесткими предшественниками. Робонога способна прыгать на высоту 13 см, что составляет 40% от ее роста.
Исследователи отмечают, что функциональность робоноги ограничена: она способна выполнять лишь прыжки по кругу. Так что до создания роботов, полностью оснащенных такими искусственными мышцами, пока далеко. Тем не менее, компоненты для производства этих мышц доступны по цене, что открывает перспективы для массового производства и развития технологии в ближайшем будущем.



