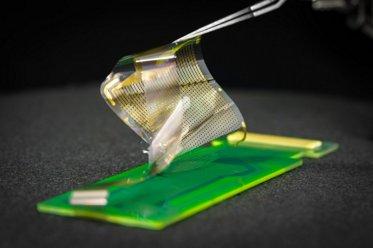
Свой подход специалисты из Массачусетского технологического института назвали SimPLE (Simulation to Pick Localize and placE). Он учит робота, не имеющего опыта взаимодействия с подобными объектами, брать, удерживать и класть предметы при помощи модели автоматизированного проектирования.
Система SimPLE состоит из трех основных компонентов: осознанного захвата, визуального и тактильного восприятия и планирования повторного захвата. Наблюдения за реальной средой сравниваются с данными моделирования посредством обучения с подкреплением. Это позволяет упростить процесс перемещения похожих объектов. Авторы изобретения объединяют обоснованные геометрические алгоритмы и показывают, как с их помощью улучшить производительность по сравнению с другими методами обучения ИИ, пишет MIT News.
В ходе экспериментов SimPLE успешно продемонстрировал способность брать и перекладывать объекты разной формы. В случае шести разных предметов точность составила свыше 90%, для 11 предметов — свыше 80%.
«Преимущество SimPLE в том, что этот подход позволяет решать очень разные задачи на одинаковым аппаратным и программным обеспечением, при помощи симуляций, которые учат модели приспосабливаться к каждой конкретной задаче», — сказал Альберто Родригес, руководитель команды инженеров. — В этом исследовании мы показали, что можно добиться уровня точности, необходимого для многих промышленных задач по размещению компонентов, без каких-либо других специализаций».
Компания Perceptive представила результаты первой полностью автоматизированной стоматологической операции, которую выполнил робот без помощи врача. Участие стоматолога-человека закончилось на этапе обсуждения проблемы с пациентом, после чего робот приступил к работе.