Профессор Сёдзи Такеучи и его коллеги два года назад успешно покрыли моторизированный палец робота биоинженерной кожей, сделанной из живых человеческих клеток. Этот эксперимент доказал, что технология может привести к созданию роботов с самовосстанавливающимся и чувствительным к прикосновениям покрытием.
Однако, кожа на пальце робота не была прикреплена к нему, а представляла собой своеобразный чехол. Естественная человеческая кожа соединена с подлежащими мышцами с помощью связок, что позволяет людям выражать эмоции и предотвращает её повреждение при движении.
Ранее учёные пытались прикрепить биоинженерную кожу к синтетическим поверхностям с помощью маленьких якорей, но это часто портило внешний вид кожи и не работало на вогнутых поверхностях. Поэтому команда Такеучи разработала новую систему крепления кожи с использованием крошечных V-образных перфораций на синтетической поверхности.
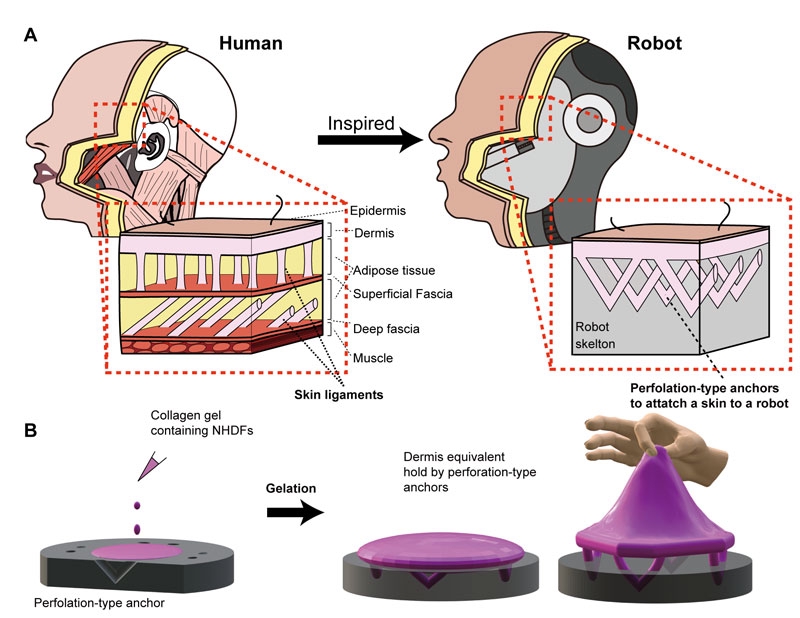
Исследователи создали человеческий лицевой слепок с такими перфорациями и покрыли его гелем из коллагена и дермальных фибробластов — клеток, отвечающих за образование соединительной ткани. Гель проник в перфорации и образовал кожный покров, который надёжно прикрепился к слепку.
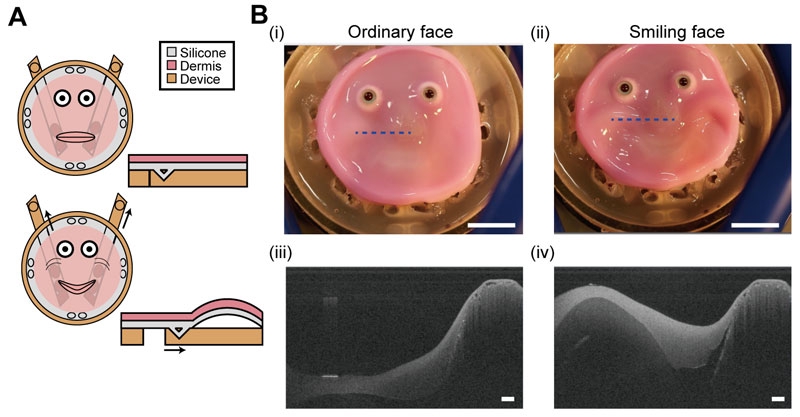
В другом эксперименте перфорации сделали на силиконовой основе, на которую нанесли гель и оставили культивироваться. В результате получилась упрощённая модель человеческой кожи, которая могла растягиваться в улыбке при движении двух стержней, соединённых с основой.
Профессор Такеучи отметил, что для создания более толстой и реалистичной кожи необходимо имитировать потовые и сальные железы, поры, кровеносные сосуды, жир и нервы. «Важно не только материал, но и движение, поэтому следующая задача — научиться подражать человеческой мимике с помощью сложных приводов или мышц внутри робота,» — добавил он.