Мышечная ткань, помещенная в питательную среду, будет сокращаться сама по себе, но эти движения хаотичны и бесполезны. Чтобы использовать мышцу как механический привод, инженеры обычно крепят ее к двум гибким штифтам. При сокращении мышца сгибает штифты, создавая движение, которое может активировать часть роботизированного скелета. Однако в таких конструкциях движение ограничено, так как контакт между мышцей и штифтами не всегда оптимален. В зависимости от расположения мышцы на штифтах, она может не только стягивать их, но и неконтролируемо раскачиваться. Для создания роботов с мышечными приводами необходимо улучшить методы крепления мышц к механическим элементам.
Ученые стремились спроектировать скелет, который фокусирует и максимизирует сокращения мышц, независимо от их расположения, для предсказуемого и надежного движения. Исследователи сначала рассмотрели несколько направлений, в которых мышца может естественным образом двигаться. Они пришли к выводу, что если мышца соединяет две стойки вместе в определенном направлении, стойки должны быть соединены с пружиной, которая позволяет им двигаться только в этом направлении при натяжении. Поэтому нужно было создать устройство, которое было бы очень мягким и гибким в одном направлении и очень жестким во всех других направлениях, чтобы при сокращении мышцы вся эта сила эффективно преобразовывалась в движение в одну сторону.
Исследователи объединились с лабораторией профессора Мартина Калпеппера, чтобы разработать устройство с конфигурацией и жесткостью, позволяющее мышечной ткани естественным образом сокращаться и максимально растягивать пружину. Эта лаборатория MIT специализируется на проектировании и производстве прецизионных элементов машин, таких как миниатюрные приводы, подшипники и другие механизмы. Эти элементы могут быть встроены в различные системы, обеспечивая сверхточное перемещение, измерение и управление. Среди разработок группы есть гибкие пружинные устройства, которые могут сгибаться и растягиваться с точностью до нанометра.
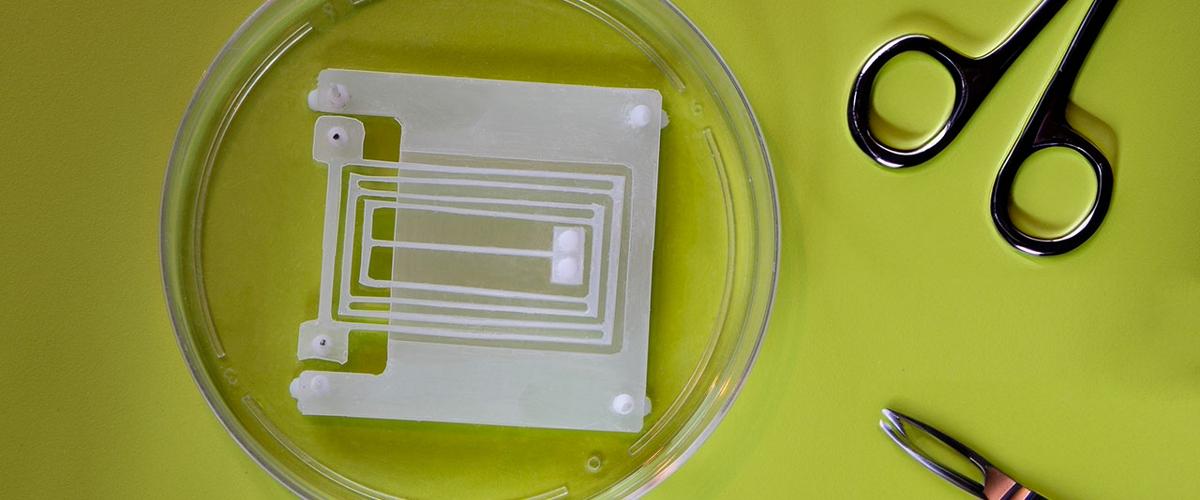
Команда провела расчеты и разработала конфигурацию и размеры устройства, которое позволяет связать естественные силы мышц с жесткостью изгиба и степенью движения. Итоговый изгиб составляет порядка 1/100 от жесткости самой мышечной ткани. Устройство имеет форму миниатюрной гармошки, где углы прикреплены к основанию через небольшие стойки. Ученые обернули полосу мышц вокруг этих угловых стоек, используя живые мышечные волокна, выращенные из клеток мыши. Затем они измерили, насколько близко стойки сближались при сокращении мышечной полосы.
За счет выбранной конфигурации изгиба мышечная группа сокращалась главным образом в направлении между двумя стойками. Это управляемое сокращение позволило мышце сблизить стойки друг с другом в пять раз ближе по сравнению с предыдущими моделями мышечных приводов. Устройство, разработанное командой, имеет гибкую и мягкую структуру в одном направлении, одновременно обладая высокой жесткостью в других направлениях. При сокращении мышцы вся сила преобразуется в движение в этом направлении, что приводит к заметному увеличению эффективности. Также устройство можно использовать для точного измерения мышечной активности и выносливости. Путем изменения частоты мышечных сокращений (например, стимулируя сокращения мышцы один раз в секунду вместо четырех), исследователи заметили, что мышцы устают и не производят такой сильной тяги. Их также можно «тренировать».
Исследователи адаптируют и комбинируют изгибы для создания точных, шарнирно-сочлененных и надежных роботов, приводимых в движение естественными мышцами. Например, компания хочет создать хирургического робота, который сможет выполнять минимально инвазивные процедуры внутри тела.