
В статье Nature Communications описывается уникальное «шасси», которое делает возможным такое приземление. Главный автор работы — Рафаэль Зуфферей, научный сотрудник Лаборатории интеллектуальных систем Biorobotics Lab. Он построил и испытал орнитоптер вместе с коллегами из Университета Севильи в Испании, где 700-граммовый робот разрабатывался в рамках европейского проекта GRIFFIN.
Инженерные проблемы, связанные с посадкой орнитоптера на насест без каких-либо внешних команд, требовали управления многими факторами, которые природа уравновесила сама. Орнитоптер должен иметь возможность значительно замедляться, когда садится, оставаясь при этом на лету. Коготь должен был быть достаточно сильным, чтобы ухватиться за насест и выдержать вес робота, но не настолько тяжелым, чтобы его нельзя было удержать в воздухе. Это одна из причин, по которой ученые выбрали одну клешню, а не две. Наконец, робот должен иметь возможность воспринимать окружающую среду и насест перед ним в зависимости от собственного положения, скорости и траектории.
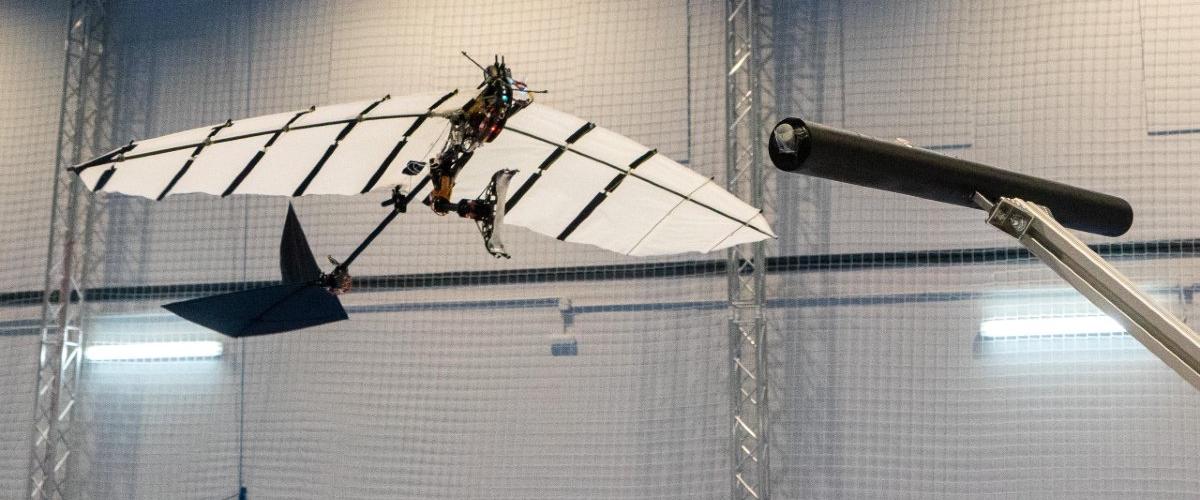
Этого удалось добиться, когда инженеры оснастили орнитоптер бортовым компьютером и навигационной системой, дополненной внешней системой захвата движения, которая позволяла роботу определять свое положение. Придаток ноги-клешни орнитоптера был точно откалиброван, чтобы компенсировать колебания вверх-вниз во время полета, когда он пытался ухватиться за насест. Сама клешня была разработана так, чтобы поглощать импульс движения робота при ударе и быстро и надежно закрываться, чтобы выдержать его вес. Оказавшись на насесте, робот остается на нем без затрат энергии.
Если орнитоптер научится самостоятельно приземляться на ветку дерева, он сможет выполнять разные задачи, например, собирать биологические образцы или измерения с деревьев. Он также может садиться на искусственные сооружения, что открывает новые области применения. Посадка на насест позволит орнитоптерам эффективнее перезаряжаться с помощью солнечной энергии, что потенциально делает их идеальными для дальних миссий. Орнитоптеры, как и многие беспилотные летательные аппараты, имеют ограниченный срок службы батареи.
Инженеры сконструировали сразу двух когтеобразных орнитоптеров, чтобы воспроизводить результаты тестовых полетов. Это ускоряет разработку наиболее эффективного алгоритма посадки на насест. Пока испытания идут в закрытом помещении, чтобы минимизировать на этом этапе воздействие таких факторов, как ветер и движение в поле зрения робота других объектов. Испытания орнитоптеров в непредсказуемой среде на открытом воздухе будет следующим этапом разработки.



