
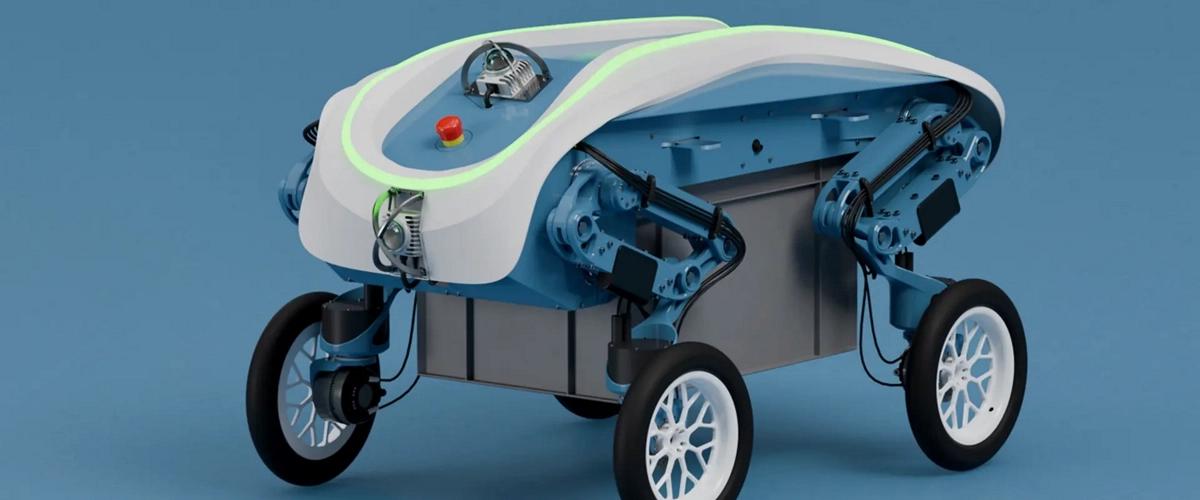
Компания RIVR, дочерняя структура швейцарского университета ETH Zurich, известна своим четвероногим роботом RIVR ONE (ранее ANYmal), который может использоваться для доставки в городах. Та же команда инженеров и дизайнеров разрабатывает LEVA — функциональный прототип робота с четырьмя «ногами», каждая из которых оснащена моторизованным колесом вместо стопы, подобно RIVR ONE.
Благодаря такой конструкции робот может быстро и с низким энергопотреблением передвигаться по ровным поверхностям, например, тротуарам, просто катясь на колесах, как автомобиль. Для самостоятельной навигации по городским улицам и объезда препятствий он использует GPS, лидарные датчики и камеры.
Если роботу нужно преодолеть лестницу или бордюр, он блокирует колеса и передвигается, как собака. Эту же способность он использует для движения по неровной местности, где катиться невозможно.
Главное отличие LEVA от RIVR ONE — его способность самостоятельно находить, поднимать и переносить стандартные евроконтейнеры весом до 85 кг. Для этого робот оснащен пятью камерами: по одной с каждой из четырех вертикальных сторон его прямоугольного корпуса и одна снизу. Каждое колесо управляется независимо, поэтому LEVA может двигаться в любом направлении.
Как только LEVA оказывается над ящиком, он сгибает свои «ноги» и опускается. Затем внутренние моторизованные крюки захватывают верхнюю часть контейнера, закрепляя его под корпусом робота. После этого LEVA просто поднимается и едет к нужной точке.
Инженеры продолжают отлаживать его работу в реальных условиях. Так что пока сложно сказать, когда LEVA может появиться на улицах.



