
Современные хирургические роботы работают, как человеческая рука. Они используют тросики, похожие на сухожилия, чтобы двигать инструментами, как мышцы двигают пальцами. Но когда инструменты становятся очень маленькими, этот способ перестает работать.
Вместо кабелей и шкивов, новые инструменты используют материалы, которые реагируют на магнитное поле. Хирург управляет ими с помощью внешних электромагнитных полей. Система состоит из двух частей: крошечных приборов (захват, скальпель, щипцы) и стола с электромагнитными катушками, которые управляют движением этих инструментов.
Чтобы провести операцию, голову пациента помещают над электромагнитными катушками. Маленькие роботизированные инструменты вводят в мозг через небольшой разрез. Управляя электричеством в катушках, врачи могут менять магнитное поле и заставлять инструменты захватывать, тянуть или резать ткани.
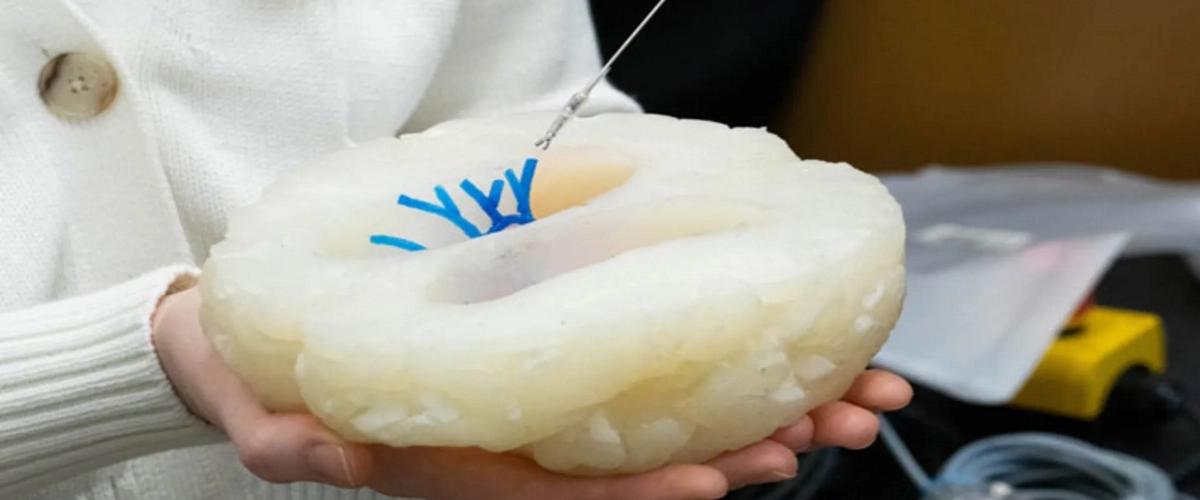
Для проверки инструментов ученые создали модель человеческого мозга в натуральную величину из силиконовой резины. Они использовали кусочки тофу и малину, чтобы имитировать ткани мозга, с которыми должны работать инструменты. Тофу подошёл для имитации разрезов скальпелем, так как его консистенция похожа на мозолистое тело — часть мозга, которую нужно было оперировать. Малину использовали для проверки захвата, чтобы понять, смогут ли инструменты удалять ткани, как это делает хирург при извлечении пораженных участков.
Испытания показали, что магнитный скальпель делает более точные разрезы (0,3-0,4 мм), чем обычные инструменты (0,6-2,1 мм). Захваты успешно справлялись с задачей в 76% случаев. Аналогичные результаты были получены на животных моделях.
Несмотря на это, внедрение магнитных хирургических роботов в практику потребует времени и дальнейших исследований. Разработка медицинских технологий, особенно робототехники, иногда занимает десятилетия. Команда планирует интегрировать свою разработку с технологиями визуализации, например, рентгеноскопией.



