

Кольцеобразный корпус устройства состоит из трех изогнутых связанных сегментов. Каждый сегмент оснащен собственным модулем с двигателем/пропеллером, который крепится на стержне, проходящем по всей ширине сегмента. Модуль может вращаться вокруг стержня, как прищепка на бельевой веревке. Благодаря этому он может направляться к центру кольца, к краю кольца или в любую другую сторону.
Когда дрон летит, его корпус ориентирован параллельно земле, причем все три винта с вектором тяги обращены вверх. Дрон может рассоединять эти части, выходя из кольцеобразной формы, чтобы стать уже. Это позволяет пролетать через узкие места, например, между деревьями или через окна.
Полет, безусловно, является самым быстрым способом пересечения непроходимой местности, но поддержание веса дрона в воздухе потребляет много энергии аккумулятора. Вот почему он может катиться как колесо.
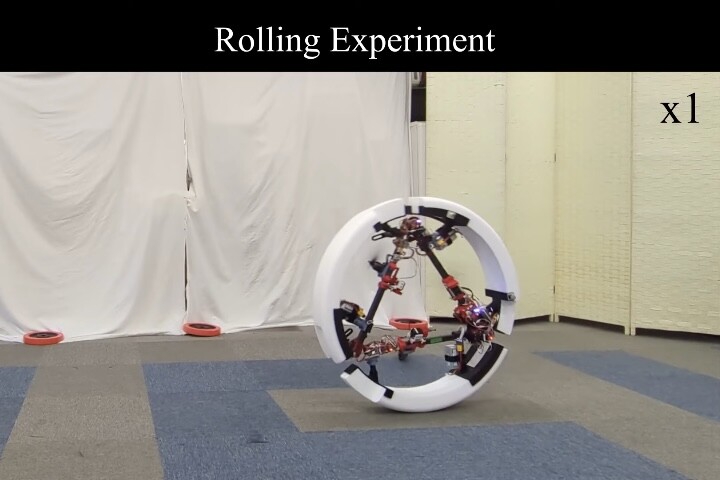
Для этого Delta приземляется плашмя на одну сторону, затем поворачивает пропеллеры таким образом, чтобы их совместная тяга поднимала дрон вертикально. Микропроцессор бортовой системы постоянно регулирует угол наклона пропеллеров, позволяя дрону катиться вперед, сохранять баланс и поворачивать налево или направо.
Ученые планируют адаптировать «Дельту» для катания по неровным поверхностям и для оценки местности с помощью камер и других бортовых датчиков. По словам разработчиков, другие дроны, которые могут и летать и ездить, обычно имеют отдельные двигатели для пропеллеров и колес. Это делает их более тяжелыми и сложными. «Дельта» же использует одни и те же пропеллеры для полета и езды.



