Повреждения желудочных стенок — распространенная проблема, в той или иной степени от нее страдает 12% населения мира. Биопечать — доставка новых клеток прямо к поврежденному месту — может стать новым, более эффективным методом лечения патологий желудочно-кишечного тракта, считают ученые из Университета Цинхуа.
«Проблема в том, что современная технология биопечати сосредоточилась на внешней стороне. Биопринтеры обычно довольно большие, и их нельзя использовать для починки внутренних тканей без инвазивной хирургии. Для того чтобы преодолеть эту проблему, мы разработали микроробота, который проникает в тело через эндоскоп и чинит ткани внутри организма», — рассказал профессор Сюй Тао.
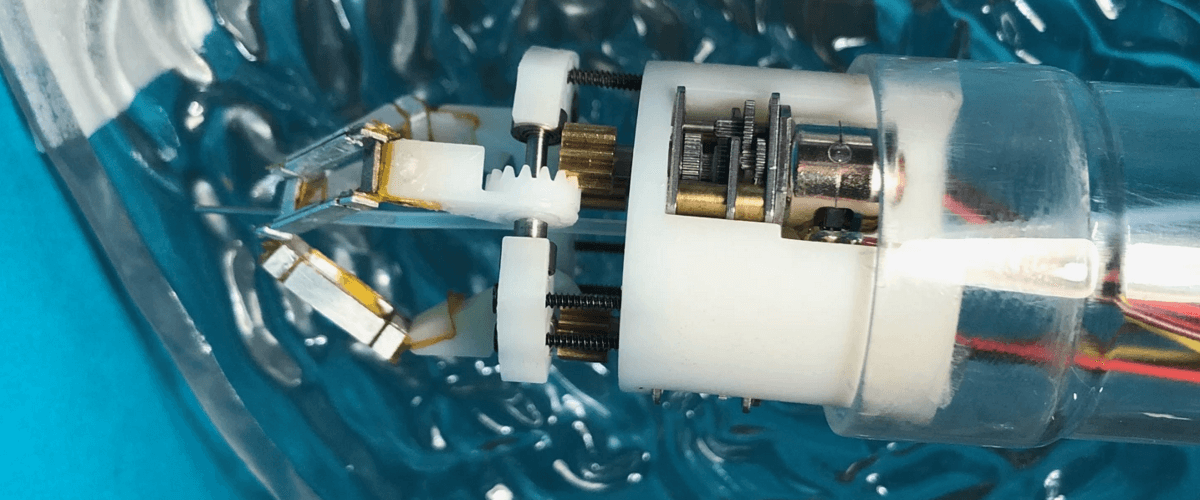
Микроробот Delta состоит из основания, подвижной платформы и трех идентичных кинематических цепей. Он сделан насколько возможно неинвазивным и может складываться перед проникновением в тело человека, а потом разворачиваться и приступать к печати биологических тканей, сообщает Science Daily.
Ученые протестировали систему двумя способами. Во-первых, с помощью биологической модели человеческого желудка и энедоскопа они проверили, как робот движется внутри желудка и печатает. Во-вторых, они испытали эффективность нанесения жизнеспособных клеток на поврежденный участок.
Оба теста показали обнадеживающие результаты. Десятидневная клеточная культура показала, что напечатанные клетки оставались живыми и готовыми к размножению. Этот результат позволяет надеяться на возможность печати жизнеспособных клеточных каркасов, пригодных для лечения повреждений стенок желудка.
В начале года в Торонто робот провел первую операцию на сосудах головного мозга. Врачи успешно использовала достижения робохирургии, чтобы прооперировать внутричерепную аневризму у 64-летней пациентки. Все манипуляции, включая установку стента и фиксирующих микроспиралей, выполнялись с помощью роботизированной руки.